
This is the second project we are going discuss in this chapter. The aim of this project is to control robot joints from the web browser itself.
Here is the block diagram of the working of a joint state publisher from the web browser:
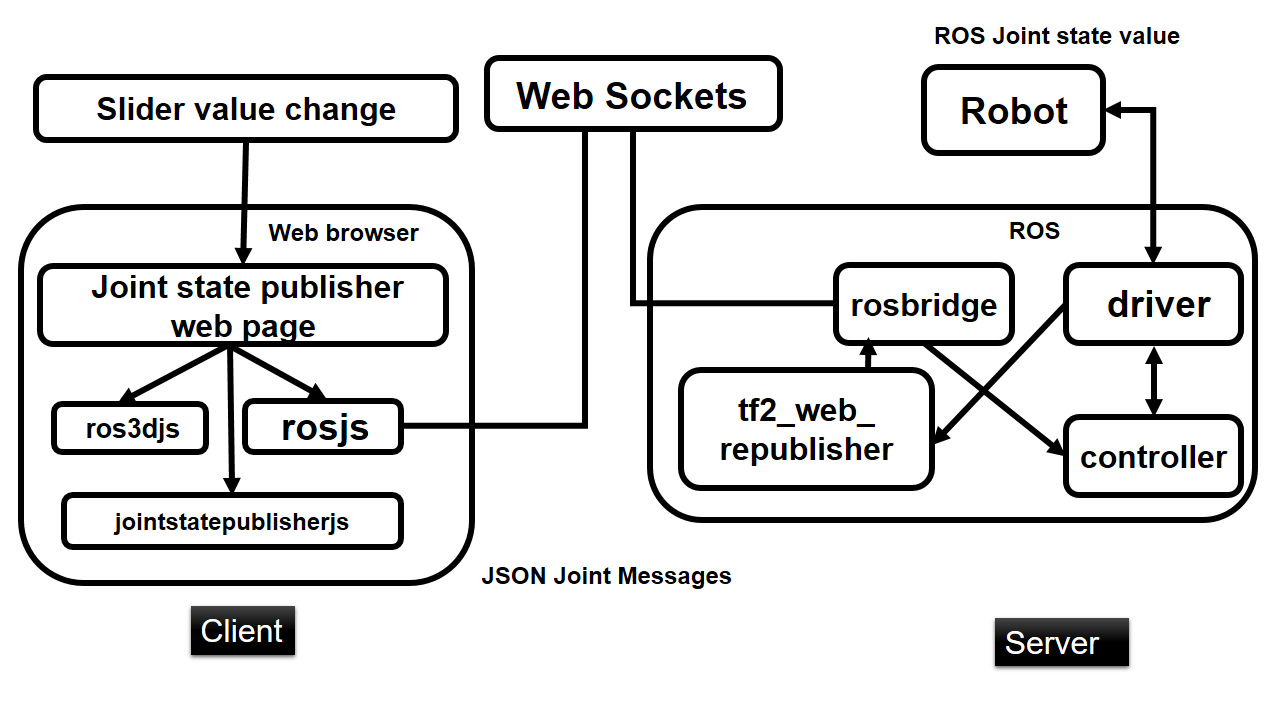
Figure 6: Block diagram of web-based joint state controller
From the block diagram, we can see that we are using another JavaScript module called jointstatepublisherjs. This module has a class to create a joint state publisher for all joints defined inside the URDF file.