
Let's see how a ROS controller interacts with Gazebo. The following figure shows the interconnection of the ROS controller, robot hardware interface, and simulator/real hardware:

We can see the third-party tool such as navigation and MoveIt packages. These packages can give the goal (set point) to the mobile robot controllers and robotic arm controllers. These controllers can send the position, velocity, or effort to the robot hardware interface.
The hardware interface allocates each resource for the controllers and sends values to each resource. The detailed diagram of communications between the robot controllers and robot hardware interfaces are shown as follows:
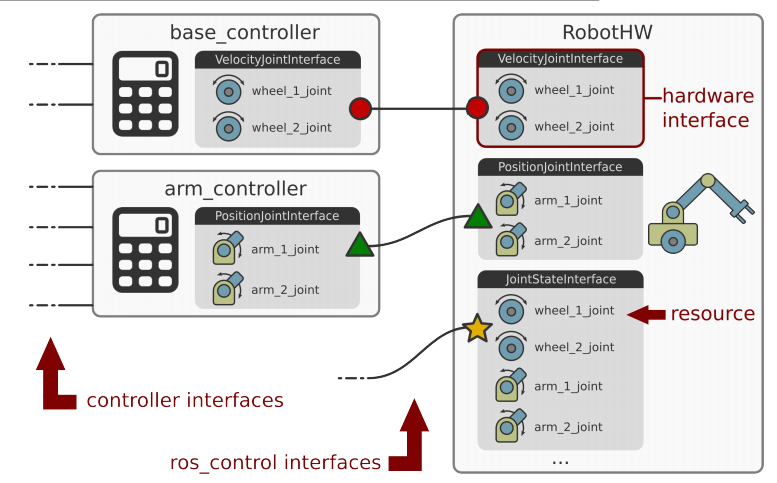
The hardware interface is decoupled from actual hardware and simulation. The values from the hardware interface can be fed to Gazebo for simulation or to the actual hardware, itself.
The hardware interface is a software representation of the robot and its abstract hardware. The resource of the hardware interfaces are actuators, joints, and sensors. Some resources are read-only such as joint states, IMU, force-torque sensors, and so on and some are read and write compatible such as position, velocity, and effort joints.