
Okay, so we are ready to run the application. Let's begin.
You can run any robot simulation that has some sort of image topic or camera topic.
For a demo, we will launch the TurtleBot simulation using the following command:
$ roslaunch turtlebot_gazebo turtlebot_world.launch
After launch the simulation, run the HTTPS streamer node from web_video_server:
$ rosrun web_video_server web_video_server
After running web_video_server, launch rosbridge_server to send Twist messages to ROS from the keyboard teleoperation module:
$ roslaunch rosbridge_server rosbridge_websocket.launch
Now, open Robot_Surveillance.html to look at the output.
Here is the output you will get for the Robot_Surveillance application.
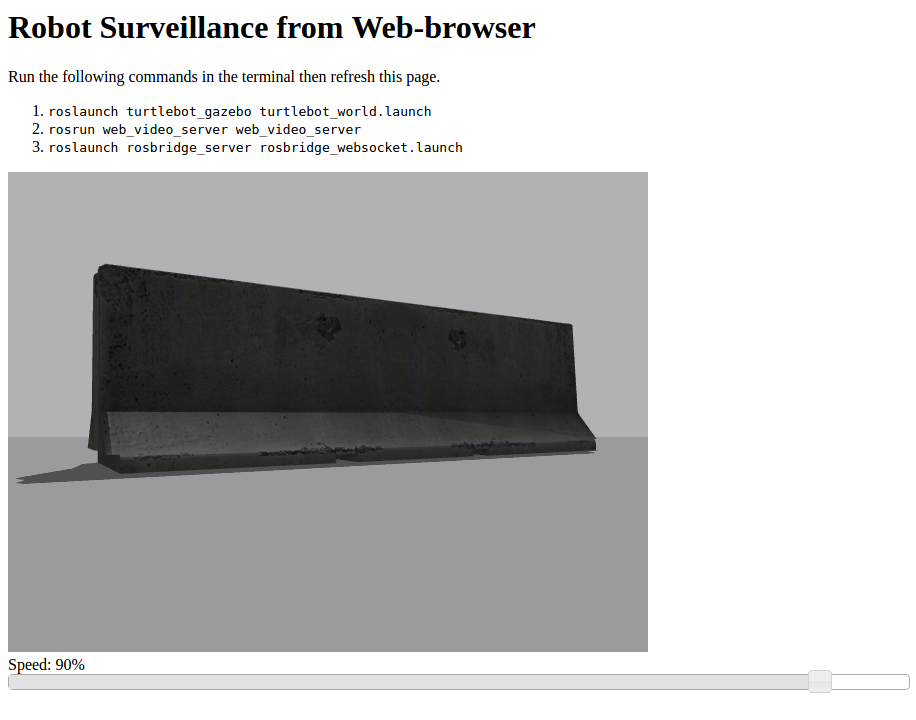
Figure 8: The robot surveillance application
Now you can move the robot and look at the camera view from inside the browser itself.