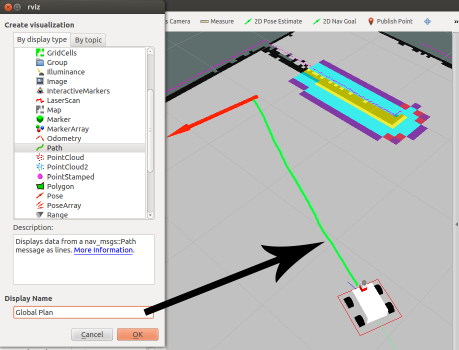
This shows the portion of the global plan that the local planner is currently pursuing. You can see it in green in the next image. Perhaps the robot will find obstacles during its movement, and the navigation stack will recalculate a new path to avoid collisions and try to follow the global plan.
- Topic: TrajectoryPlannerROS/global_plan
- Type: nav_msgs/Path