
Let's go through how we can run the image recognition node.
First, you have to plug a UVC webcam, which we used in Chapter 20, Face Detection and Tracking Using ROS, OpenCV and Dynamixel Servos Run roscore:
$ roscore
Run the webcam driver:
$ rosrun cv_camera cv_camera_node
Run the image recognition node, simply using the following command:
$ python image_recognition.py image:=/cv_camera/image_raw
When we run the recognition node, it will download the inception model and extract it into the /tmp/imagenet folder. You can do it manually by downloading inception-v3 from the following link:
http://download.tensorflow.org/models/image/imagenet/inception-2015-12-05.tgz
You can copy this file into the /tmp/imagenet folder:
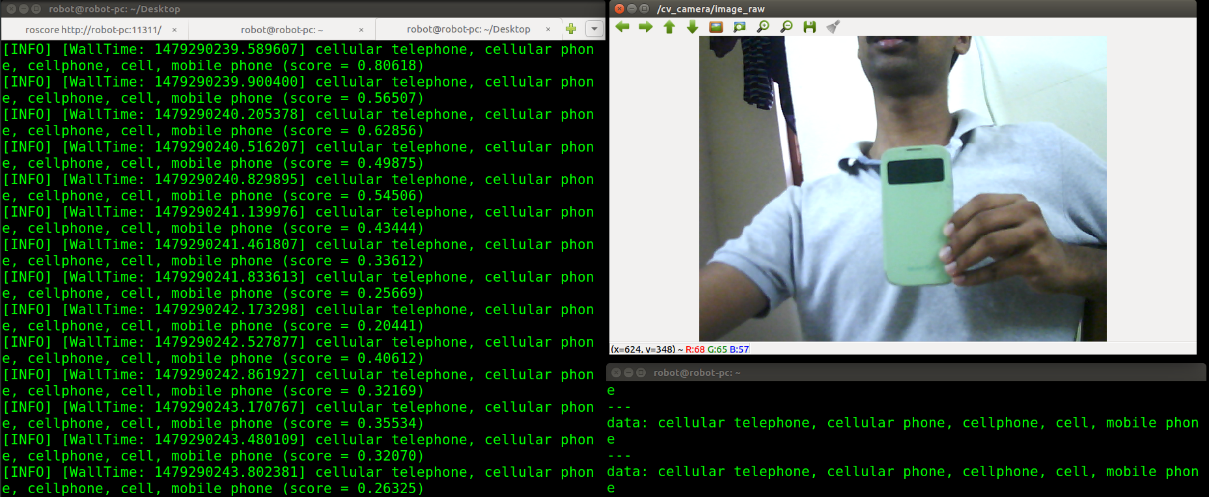
You can see the result by echoing the following topic:
$ rostopic echo /result
You can view the camera images using following command:
$ rosrun image_view image_view image:= /cv_camera/image_raw
Here is the output from the recognizer. The recognizer detects the device as a cell phone.
In the next detection, the object is detected as a water bottle:
