
If everything has been installed properly, we can test it using a few commands.
First, launch the Leap Motion driver or control panel using the following command:
$ sudo LeapControlPanel
After launching the command, you can verify that the device is working by opening the Visualizer application. If it's working well, you can launch the ROS driver using the following command:
$ roslaunch leap_motion sensor_sender.launch
If it's working properly, you will get topics with this:
$ rostopic list

Figure 9: Leap ROS driver topics
If you can see rostopic/leapmotion/data in the list, you can confirm that the driver is working. You can just echo the topic and see that the hand and finger values are coming in, as shown in the following screenshot:
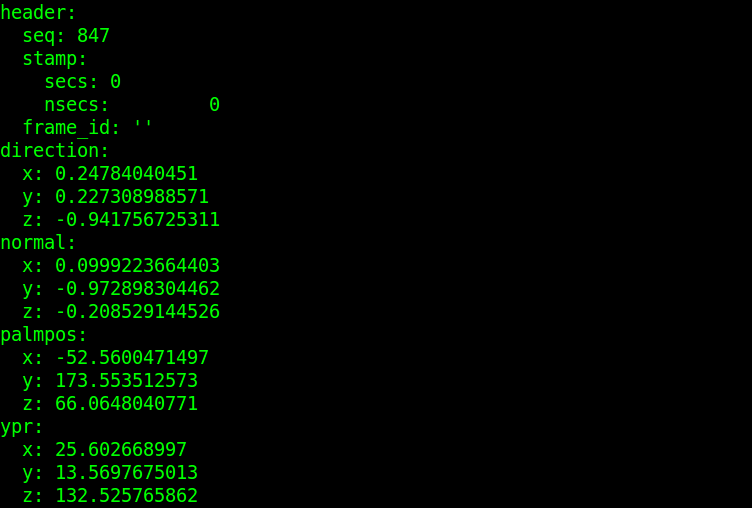
Figure 10: Data from the Leap ROS driver topic