
We will look at a basic Gazebo world plugin and try to build and load it in Gazebo.
Create a folder called gazebo_basic_world_plugin in the user home folder and create a CPP file called hello_world.cc:
$ mkdir ~/gazebo_basic_world_plugin
$ cd ~/gazebo_basic_world_plugin
$ nano hello_world.cc
The definition of hello_world.cc is as follows:
//Gazebo header for getting core gazebo functions
#include <gazebo/gazebo.hh>
//All gazebo plugins should have gazebo namespace
namespace gazebo
{
//The custom WorldpluginTutorials is inheriting from standard worldPlugin. Each world plugin has to inheriting from standard plugin type.
class WorldPluginTutorial : public WorldPlugin
{
public: WorldPluginTutorial() : WorldPlugin()
{
printf("Hello World!
");
}
//The Load function can receive the SDF elements
public: void Load(physics::WorldPtr _world, sdf::ElementPtr _sdf)
{
}
};
//Registering World Plugin with Simulator
GZ_REGISTER_WORLD_PLUGIN(WorldPluginTutorial)
}
The header file used in this code is <gazebo/gazebo.hh>; the header contains core functionalities of Gazebo. Other headers are as follows:
- gazebo/physics/physics.hh: This is the Gazebo header for accessing the physics engine parameters
- gazebo/rendering/rendering.hh: This is the Gazebo header for handling rendering parameters
- gazebo/sensors/sensors.hh: This is the header for handling sensors
At the end of the code, we have to export the plugin using the statements
mentioned below.
The GZ_REGISTER_WORLD_PLUGIN(WorldPluginTutorial) macro will register and export the plugin as a world plugin. The following macros are used to register for sensors, models, and so on:
- GZ_REGISTER_MODEL_PLUGIN: This is the export macro for Gazebo robot model
- GZ_REGISTER_SENSOR_PLUGIN: This is the export macro for Gazebo sensor model
- GZ_REGISTER_SYSTEM_PLUGIN: This is the export macro for Gazebo system
- GZ_REGISTER_VISUAL_PLUGIN: This is the export macro for Gazebo visuals
After setting the code, we can make the CMakeLists.txt for compiling the source. The following is the source of CMakeLists.txt:
$ nano ~/ gazebo_basic_world_plugin/CMakeLists.txt
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
find_package(Boost REQUIRED COMPONENTS system)
include_directories(${Boost_INCLUDE_DIRS})
link_directories(${Boost_LIBRARY_DIRS})
include (FindPkgConfig)
if (PKG_CONFIG_FOUND)
pkg_check_modules(GAZEBO gazebo)
endif()
include_directories(${GAZEBO_INCLUDE_DIRS})
link_directories(${GAZEBO_LIBRARY_DIRS})
add_library(hello_world SHARED hello_world.cc)
target_link_libraries(hello_world ${GAZEBO_LIBRARIES} ${Boost_LIBRARIES})
Create a build folder for storing the shared object:
$ mkdir ~/gazebo_basic_world_plugin/build
$ cd ~/gazebo_basic_world_plugin/build
After switching to the build folder, execute the following command to compile and build the source code:
$ cmake ../
$ make
After building the code, we will get a shared object called libhello_world.so and we have to export the path of this shared object in GAZEBO_PLUGIN_PATH and add to the .bashrc file:
export GAZEBO_PLUGIN_PATH=${GAZEBO_PLUGIN_PATH}:~/gazebo_basic_world_plugin/build
After setting the Gazebo plugin path, we can use it inside the URDF file or the
SDF file. The following is a sample world file called hello.world, which includes this plugin:
$ nano ~/gazebo_basic_world_plugin/hello.world
<?xml version="1.0"?>
<sdf version="1.4">
<world name="default">
<plugin name="hello_world" filename="libhello_world.so"/>
</world>
</sdf>
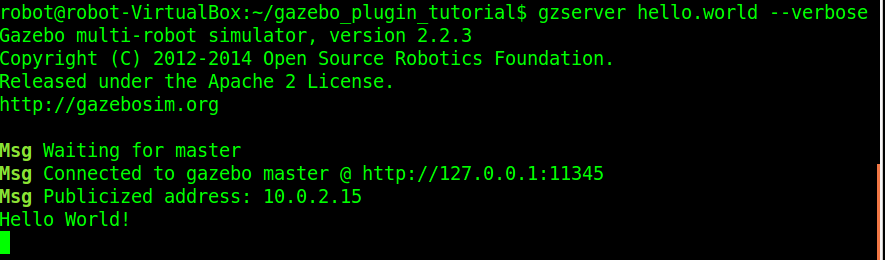
Run the Gazebo server and load this world file:
$ cd ~ /gazebo_basic_world_plugin
$ gzserver hello.world --verbose
We will source the code for various Gazebo plugins from the Gazebo repository.
We can check https://bitbucket.org/osrf/gazebo
Browse for the source code. Take the examples folder and then the plugins, as shown
in the following figure:
