Finally, we can do what viso2_demo does with our own stereo pair. We only have
to run the following command to run the stereo odometry and see the results in
rqt_rviz (note that the tf tree is published by default):
$ roslaunch chapter5_tutorials camera_stereo.launch odometry:=true
rviz:=true
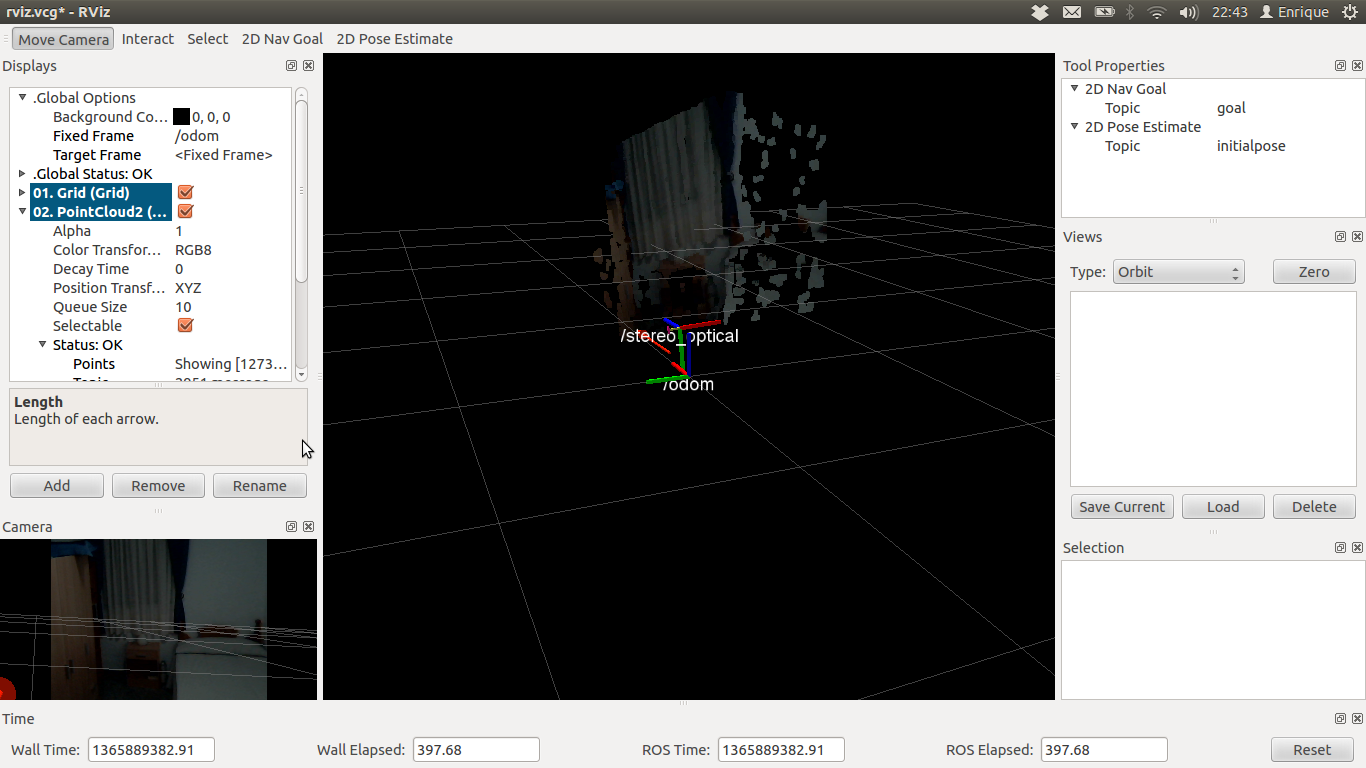
The following image shows an example of the visual odometry system running for our low-cost stereo camera. If you move the camera, you should see the /odom frame moving. If the calibration is bad or the cameras are very noisy, the odometer may get lost, which is indicated by a warning message on the terminal. In that case, you should look for better cameras or recalibrate them to see whether better results can be obtained. You might also want to have to look for better parameters for the disparity algorithm: