When we check the code, we can add a <robot> tag at the top of the description:
<?xml version="1.0"?> <robot name="pan_tilt">
The <robot> tag defines the name of the robot that we are going to create.
Here, we named the robot pan_tilt.
If we check the sections after the <robot> tag definition, we can see link and joint definitions of the pan and tilt mechanism:
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.01" radius="0.2"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="yellow">
<color rgba="1 1 0 1"/>
</material>
</visual>
</link>
The preceding code snippet is the base_link definition of the pan and tilt mechanism. The <visual> tag can describe the visual appearance of the link, which is shown on the robot simulation. We can define the link geometry (cylinder, box, sphere, or mesh) and the material (color and texture) of the link using this tag:
<joint name="pan_joint" type="revolute">
<parent link="base_link"/>
<child link="pan_link"/>
<origin xyz="0 0 0.1"/>
<axis xyz="0 0 1" />
</joint>
In the preceding code snippet, we define a joint with a unique name and its joint type. The joint type we used here is revolute and the parent link and child link are base_link and the pan_link respectively. The joint origin is also specified inside this tag.
Save the preceding URDF code as pan_tilt.urdf and check whether the urdf contains errors using the following command:
$ check_urdf pan_tilt.urdf
The check_urdf command will parse urdf and show an error, if any. If everything
is OK, it will show an output as follows:
robot name is: pan_tilt
---------- Successfully Parsed XML ---------------
root Link: base_link has 1 child(ren)
child(1): pan_link
child(1): tilt_link
If we want to view the structure of the robot links and joints graphically, we can use a command tool called urdf_to_graphiz:
$ urdf_to_graphiz pan_tilt.urdf
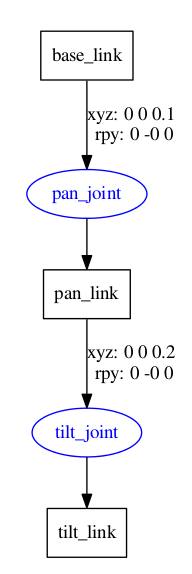
This command will generate two files: pan_tilt.gv and pan_tilt.pdf. We can view the structure of this robot using following command:
$ evince pan_tilt.pdf
We will get the following output: