
The particle cloud around the robot can be enabled using the PoseArray display topic. Here the PoseArray topic is /particlecloud displayed in RViz. The PoseArray type is renamed as Amcl Particles.
- Topic: /particlecloud
- Type: geometry_msgs/PoseArray
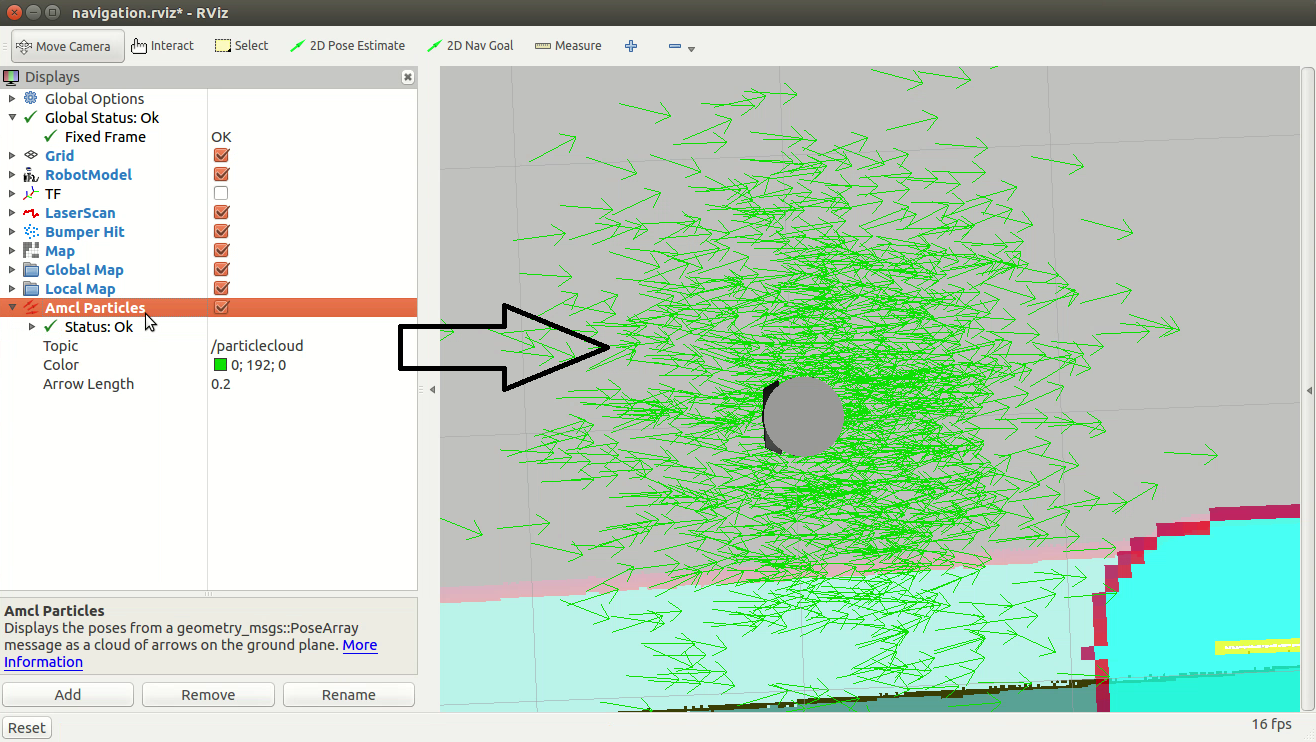
Figure 14: Visualizing AMCL particles