
Using the following command, we can create the ros_aiml package:
$ catkin_create_pkg ros_aiml rospy std_msgs sound_play
Inside the ros_aiml package, create folders called data, scripts, and launch to store the AIML files, Python scripts, and ROS launch files. This is the structure of the ros_aiml package:
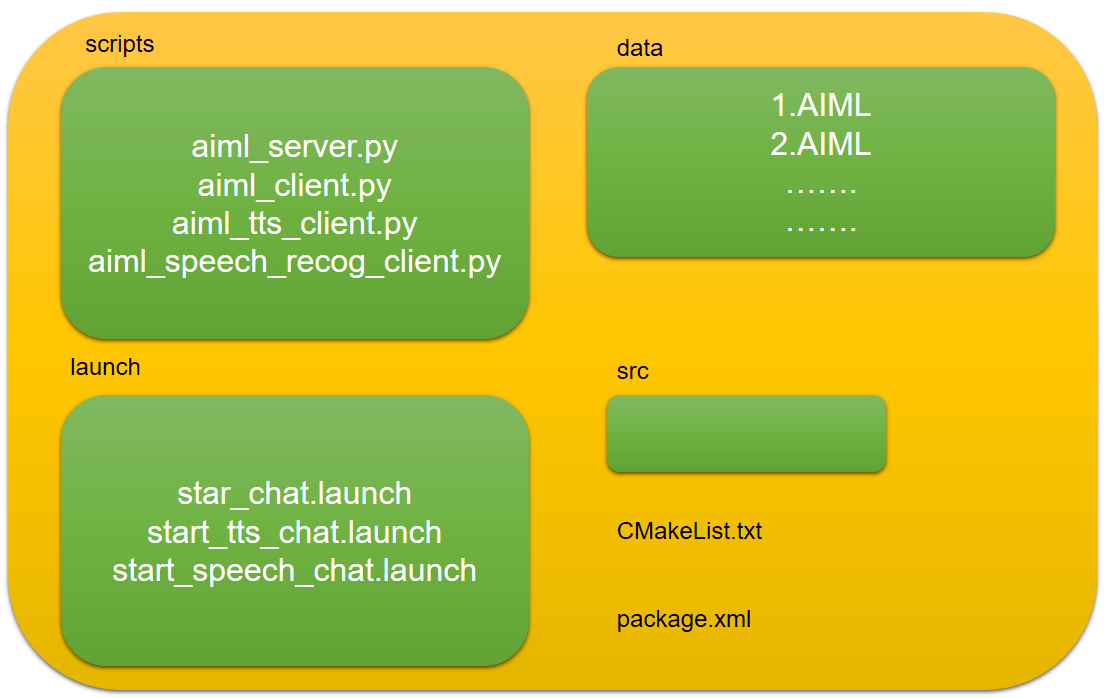
Figure 6: Structure of ros_aiml
You can keep the AIML files inside the data folder, and all launch files can be kept inside the launch folder. The scripts are saved inside the scripts folder. Let's look at each script.