
The start_speech_chat.launch launch file will start the AIML server, AIML TTS node, and speech recognition node:
<launch>
<param name="aiml_path"
value="/home/robot/ros_robotics_projects_ws/src/ros_aiml/data" />
<node name="aiml_server" pkg="ros_aiml" type="aiml_server.py"
output="screen">
</node>
<include file="$(find sound_play)/soundplay_node.launch">
</include>
<node name="aiml_tts" pkg="ros_aiml" type="aiml_tts_client.py"
output="screen">
</node>
<node name="aiml_speech_recog" pkg="ros_aiml"
type="aiml_speech_recog_client.py" output="screen">
</node>
</launch>
After creating the launch file, change its permission using the following command:
$ sudo chmod +x *.launch
Use the following command to start interacting with the AIML interpreter:
$ roslaunch ros_aiml start_chat.launch
We can use the following command to start interacting with the AIML interpreter. The response will be converted to speech as well:
$ roslaunch ros_aiml start_tts_chat.launch
The following command will enable speech recognition and TTS:
$ roslaunch ros_aiml start_speech_chat.launch
If you set up the pocketsphinx package for speech recognition, you can run it using the following command:
$ roslaunch pocketsphinx robotcup.launch
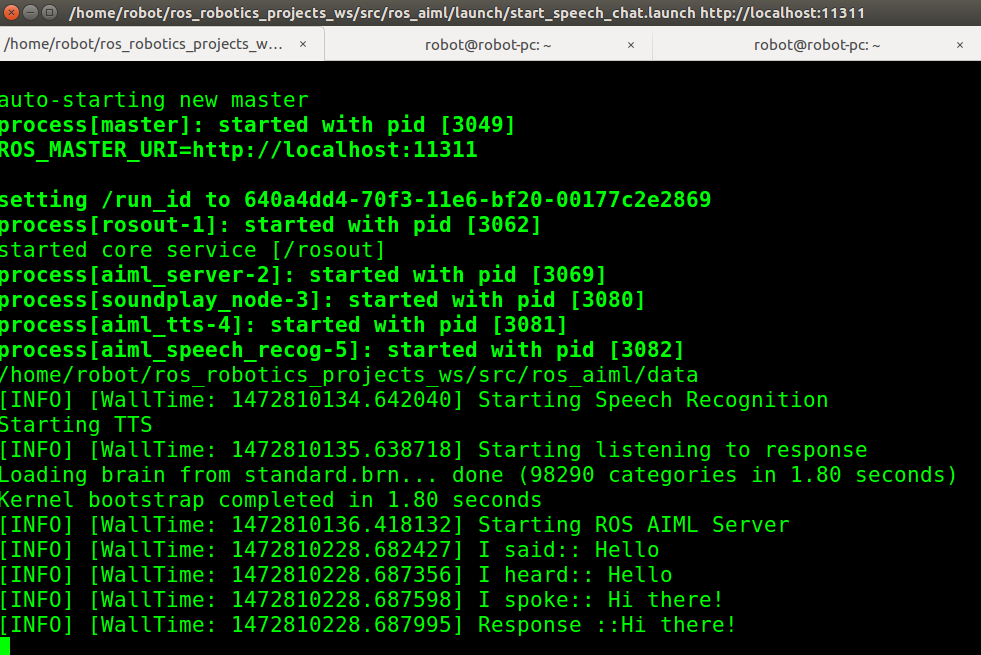
Figure 7: Output of the start_speech_chat launch file
Here are the topics generated when we run this launch file:
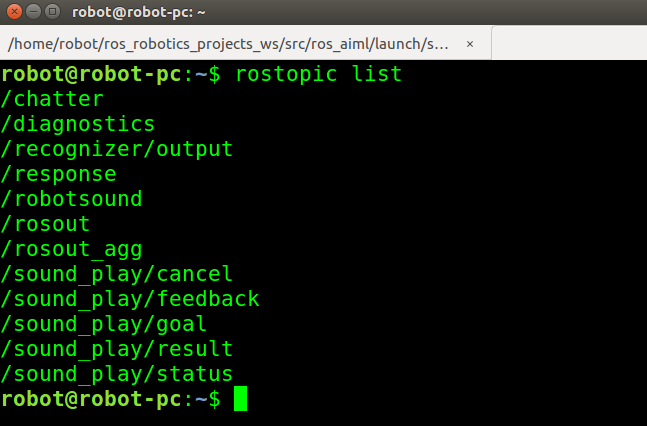
Figure 8: List of ROS topics
We can test the entire system without the speech recognition system too. You can manually publish the string to the /recognizer/output topic, as shown here:

Figure 9: Manually publishing input to speech topic