
The current goal is the commanded position of the robot using the 2D Nav Goal button or using the ROS client nodes. The red arrow indicates the current goal of the robot.
- Topic: /move_base/current_goal
- Topic type: geometry_msgs/PoseStamped
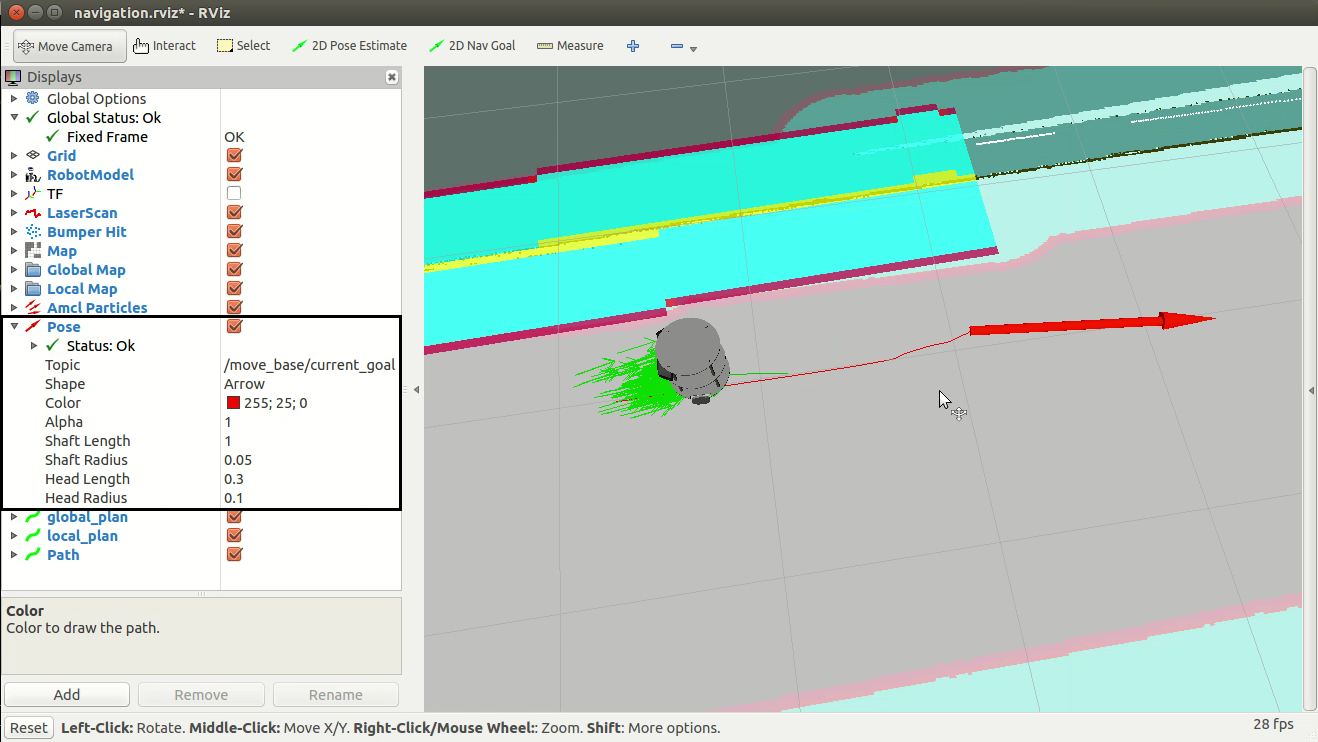
Figure 20: Visualizing robot goal position