16.3 Finding the Inverse of a Matrix
Inverse of a Matrix • Gauss–Jordan Method • Inverse on a Calculator
We now show how to find the inverse of a matrix, and in the next section, we show how it is used in solving a system of linear equations. First, we show two methods of finding the inverse of a matrix. The first method is as follows:
Interchange the elements on the principal diagonal.
Change the signs of the off-diagonal elements.
Divide each resulting element by the determinant of the given matrix.
CAUTION
This method can be used with second-order square matrices but not with higher-order matrices.
The following example illustrates this method.
EXAMPLE 1 Inverse of 2 × 2 matrix—method 1
Find the inverse of the matrix
First, we interchange the elements on the principal diagonal and change the signs of the off-diagonal elements. This gives us the matrix

Now, we find the determinant of the original matrix, which means we evaluate
CAUTION
If the value of the determinant is zero, the inverse matrix does not exist. It would cause division by zero in the method used in Example 1.
We now divide each element of the second matrix by This gives
Checking by multiplication gives
Because the matrix is the proper inverse matrix.
GAUSS–JORDAN METHOD
The second method, called the Gauss–Jordan method, involves transforming the given matrix into the identity matrix while transforming the identity matrix into the inverse. There are three types of steps allowable in making these transformations:
Any two rows may be interchanged.
Every element in any row may be multiplied by any number other than zero.
Any row may be replaced by a row whose elements are the sum of a nonzero multiple of itself and a nonzero multiple of another row.
NOTE
[Note that these are row operations, not column operations, and are the same operations used in solving a system of equations by addition and subtraction.]
EXAMPLE 2 2 × 2 Inverse—Gauss-Jordan method
Find the inverse of the matrix
First, we set up the given matrix with the identity matrix as follows:
The vertical line simply shows the separation of the two matrices.
We wish to transform the left matrix into the identity matrix. Therefore, the first requirement is a 1 for element Therefore, we divide all elements of the first row by 2. This gives the following setup:
Next, we want to have a zero for element Therefore, we subtract 4 times each element of row 1 from the corresponding element in row 2, replacing the elements of row 2. This gives us the following setup:
Next, we want to have 1, not for element Therefore, we multiply each element of row 2 by This gives
Finally, we want zero for element Therefore, we add times each element of row 2 to the corresponding elements of row 1, replacing row 1. This gives
At this point, we have transformed the given matrix into the identity matrix, and the identity matrix into the inverse. Therefore, the matrix to the right of the vertical bar in the last setup is the required inverse. Thus,
To find the inverse on a calculator, we first enter the matrix A and then use the ![]() key. Figure 16.7 shows matrix A, its inverse and the product which equals the identity matrix.
key. Figure 16.7 shows matrix A, its inverse and the product which equals the identity matrix.

Fig. 16.7
Graphing calculator keystrokes: bit.ly/
In transforming a matrix into the identity matrix, we work on one column at a time, transforming the columns in order from left to right. It is generally best to make the element on the principal diagonal for the column 1 first and then make all other elements in the column 0. The method is applicable for any square matrix. The following two examples illustrate this method, with the row operations shown in red. For example, the notation means that a row is being replaced with times row 1 plus row 2.
EXAMPLE 3 2 × 2 Inverse—Gauss-Jordan method
Find the inverse of the matrix

Therefore, which can be checked by multiplication.
EXAMPLE 4 3 × 3 Inverse—Gauss-Jordan method
Find the inverse of the matrix

Therefore, the required inverse matrix is
which may be checked by multiplication. See Fig. 16.8 for a calculator window showing in decimal and fractional form.
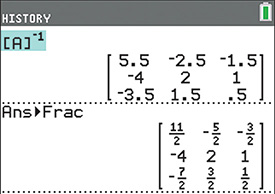
Fig. 16.8
Graphing calculator keystrokes: bit.ly/
EXERCISES 16.3
In Exercises 1 and 2, make the given changes in the indicated examples of this section and then find the matrix inverses.
In Example 1, change the element to and then find the inverse using the same method.
In Example 3, change the element to and then find the inverse using the same method.
In Exercises 3–10, find the inverse of each of the given matrices by the method of Example 1 of this section.
In Exercises 11–20, find the inverse of each of the given matrices by transforming the identity matrix, as in Examples 2–4.
In Exercises 21–28, find the inverse of each of the given matrices by using a calculator. The matrices in Exercises 23 and 24 are the same as those in Exercises 19 and 20.
In Exercises 29–31, find In Exercises 32–34, find
In Exercises 35–44, solve the given problems.
Show that the matrix has no inverse.
 Find the determinant of the matrix Explain what this tells us about its inverse.
Find the determinant of the matrix Explain what this tells us about its inverse.For the matrix show that
This verifies the method of Example 1.
- Describe the relationship between the elements of the matrix and the elements of its inverse.
In Exercise 44 of Section 16.2, we saw that the matrix multiplication rotates the points in the second matrix counterclockwise about the origin by angle If we replace the first matrix with its inverse, it has the opposite effect of rotating clockwise by angle The vertices of a triangle in a graphic design program are at and If the triangle is rotated clockwise about the origin by find the new coordinates of the vertices.
The matrix is symmetric (note the elements on opposite sides of the main diagonal are equal). Show that is also symmetric.
For the four-terminal network shown in Fig. 16.9, it can be shown that the voltage matrix V is related to the coefficient matrix A and the current matrix I by where

Fig. 16.9
Find the equations for and that give each in terms of and
The rotations of a robot arm such as that shown in Fig. 16.10 are often represented by matrices. The values represent trigonometric functions of the angles of rotation. For the following rotation matrix R, find
Fig. 16.10
An avid math student sends an encrypted matrix message E to a friend who has the coding matrix C. The friend can decode E to get message M by multiplying E by If
what is the message?
(See Exercise 43.) Using the same encryption code C, the student’s friend answered with