4.1 Angles
Positive and Negative Angles • Coterminal Angles • Angle Conversions • Standard Position of an Angle
In Chapter 2, we gave a basic definition of an angle. In this section, we extend this definition and also give some other important definitions related to angles.
An angle is generated by rotating a ray about its fixed endpoint from an initial position to a terminal position. The initial position is called the initial side of the angle, the terminal position is called the terminal side, and the fixed endpoint is the vertex. The angle itself is the amount of rotation from the initial side to the terminal side.
If the rotation of the terminal side from the initial side is counterclockwise, the angle is defined as positive. If the rotation is clockwise, the angle is negative. In Fig. 4.1, is positive and is negative.
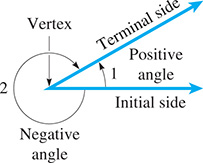
Fig. 4.1
Many symbols are used to designate angles. Among the most widely used are certain Greek letters such as (theta), (phi), (alpha), and (beta). Capital letters representing the vertex (e.g., or simply A) and other literal symbols, such as x and y, are also used commonly.
In Chapter 2, we introduced two measurements of an angle. These are the degree and the radian. Since degrees and radians are both important, we will briefly review the relationship between them in this section. However, we will not make use of radians until Chapter 8.
From Section 2.1, we recall that a degree is 1/360 of one complete rotation. In Fig. 4.2, and Note that is drawn in a clockwise direction to show that it is negative. The other angles are drawn in a counterclockwise direction to show that they are positive angles.
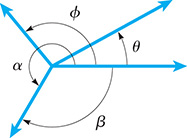
Fig. 4.2
In Chapter 2, we used degrees and decimal parts of a degree. Most calculators use degrees in this decimal form. Another traditional way is to divide a degree into 60 equal parts called minutes; each minute is divided into 60 equal parts called seconds. The symbols and are used to designate minutes and seconds, respectively.
In Fig. 4.2, we note that angles and have the same initial and terminal sides. Such angles are called coterminal angles. An understanding of coterminal angles is important in certain concepts of trigonometry.
EXAMPLE 1 Coterminal angles
Determine the measures of two angles that are coterminal with an angle of .
Because there are in one complete rotation, we can find a coterminal angle by adding to the given angle of to get . Another coterminal angle can be found by subtracting from to get See the angles in Fig. 4.3. We could continue to add , or subtract , as many times as needed to get as many additional coterminal angles as may be required.
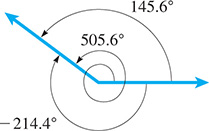
Fig. 4.3
ANGLE CONVERSIONS
NOTE
[Therefore, when using a calculator, be sure to use the mode feature to set the calculator for degrees.]
We will use only degrees as a measure of angles in most of this chapter. In later chapters, we will use radians. We can convert between degrees and radians by using a calculator feature or by the definition (see Section 2.4) of
Before the extensive use of calculators, it was common to use degrees and minutes in tables, whereas calculators use degrees and decimal parts of a degree. Changing from one form to another can be done directly on a calculator by use of the dms (degree-minute-second) feature. The following examples illustrate angle conversions by using the definitions and by using the appropriate calculator features.
EXAMPLE 2 Convert radians to degrees
Express 1.36 rad in degrees.
We know that which means Therefore,
This angle is shown in Fig. 4.4. We again note that degrees and radians are simply two different ways of measuring an angle.
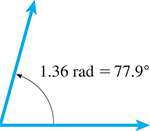
Fig. 4.4
In Fig. 4.5, a calculator display shows the conversions of 1.36 rad to degrees (calculator in degree mode) and to radians (calculator in radian mode).
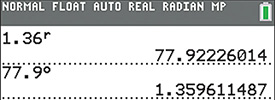
Fig. 4.5
EXAMPLE 3 Degrees, minutes—decimal form
We change to decimal form by using the fact that This means that (to nearest ). Therefore, See Fig. 4.6.

Fig. 4.6
The angle between two laser beams is . To change this to an angle measured to the nearest minute, we have
This means that See Fig. 4.7.

Fig. 4.7
STANDARD POSITION OF AN ANGLE
If the initial side of the angle is the positive x-axis and the vertex is the origin, the angle is said to be in standard position. The angle is then classified by the position of the terminal side. If the terminal side is in the first quadrant, the angle is called a first-quadrant angle. Similar terms are used when the terminal side is in the other quadrants. If the terminal side coincides with one of the axes, the angle is a quadrantal angle. For an angle in standard position, the terminal side can be determined if we know any point, except the origin, on the terminal side.
EXAMPLE 4 Angles in standard position
A standard position angle of is a first-quadrant angle with its terminal side from the x-axis. See Fig. 4.8(a).

Fig. 4.8
A second-quadrant angle of is shown in Fig. 4.8(b).
A third-quadrant angle of is shown in Fig. 4.8(c).
A fourth-quadrant angle of is shown in Fig. 4.8(d).
A standard-position angle of is shown in Fig. 4.8(e). Because the terminal side is in the third quadrant, it is a third-quadrant angle.
A standard-position angle of is a quadrantal angle since its terminal side is the positive y-axis. See Fig. 4.8(f).
EXAMPLE 5 Standard position—terminal side
In Fig. 4.9, is in standard position, and the terminal side is uniquely determined by knowing that it passes through the point (2, 1). The same terminal side passes through the points (4, 2) and among an unlimited number of other points. Knowing that the terminal side passes through any one of these points makes it possible to determine the terminal side of the angle.
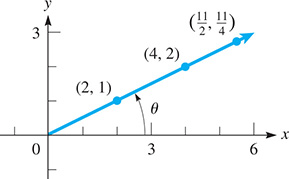
Fig. 4.9
EXERCISES 4.1
In Exercises 1–4, find the indicated angles in the given examples of this section.
In Example 1, find another angle that is coterminal with the given angle.
In Example 3, change to and then find the decimal form.
In Example 4, find another standard-position angle that has the same terminal side as the angle in Fig. 4.8(c).
In Example 4, find another standard-position angle that has the same terminal side as the angle in Fig. 4.8(e).
In Exercises 5–8, draw the given angles in standard position.
In Exercises 9–14, determine one positive and one negative coterminal angle for each angle given.
In Exercises 15–18, by means of the definition of a radian, change the given angles in radians to equal angles expressed in degrees to the nearest .
0.675 rad
0.838 rad
4.447 rad
In Exercises 19–22, use a calculator conversion sequence to change the given angles in radians to equal angles expressed in degrees to the nearest .
1.257 rad
2.089 rad
6.705 rad
In Exercises 23–26, use a calculator conversion sequence to change the given angles to equal angles expressed in radians to three significant digits.
In Exercises 27–30, change the given angles to equal angles expressed to the nearest minute.
In Exercises 31–34, change the given angles to equal angles expressed in decimal form to the nearest .
In Exercises 35–42, draw angles in standard position such that the terminal side passes through the given point.
(4, 2)
(0, 6)
In Exercises 43–50, the given angles are in standard position. Designate each angle by the quadrant in which the terminal side lies, or as a quadrantal angle.
,
,
1 rad, 2 rad
3 rad,
4 rad,
12 rad,
In Exercises 51 and 52, change the given angles to equal angles expressed in decimal form to the nearest . In Exercises 53 and 54, change the given angles to equal angles expressed to the nearest second.
A circular gear rotates clockwise by exactly 3.5 revolutions. By how many degrees does it rotate?
A windmill rotates 15.6 revolutions in a counterclockwise direction. By how many radians does it rotate?
Answers to Practice Exercises
(e)